RT3000 v4
Wenn das WO entscheidend ist
Die komplette Messlösung mit eingebauter RT-Range-Funktionalität - die vierte Generation
0.01° | 1 cm Positionsgenauigkeit |
0.05° | 250 Hz maximale Datenausgaberate |
{kind=link}

NEU RT3000 v4: Die vierte Generation des RT3000
Das RT3000 v4 wird weltweit für NCAP-Tests und autonome Fahrzeugvalidierungsprojekte genutzt.
Es vereint GNSS mit vermessungstauglicher Genauigkeit und die bislang beste inertiale Messeinheit (IMU) von OxTS in einer robusten, sofort einsatzbereiten Navigationslösung, die in allen Umgebungen ununterbrochen Positions-, Orientierungs- und Bewegungsdaten liefert.
Die wichtigsten Features im Vergleich zum RT3000 v3:
- Zuverlässige Daten in Echtzeit
- Nicht ITAR-pflichtig, keine Exportlizenz erforderlich
- Dreiminütige Aufwärmzeit ohne ausladende Bewegungen (Low-Dynamics Warmup)
- An Ihre Anforderungen angepasst
- Kostenlose Postprocessing-Tools
Anwendungsbereiche
Ideal geeignet für:
- Fahrzeugdynamikprüfungen
- Messung des Schräglaufwinkels
- Führung durch Lenkroboter verschiedenster Hersteller
- Bremstests
- NCAP-Prüfungen
- Prüfung der elektronischen Stabilitätskontrolle (ESC) - NHTSA FMVSS126
- Dynamischer Fahrspurwechsel - ISO3888
- Autonome Fahrzeugreferenz zur Ground Truth
Technische Features
Höchstleistungen selbst unter schwierigsten GNSS-Bedingungen
- Unterstützung für vier GNSS-Konstellationen (GPS, Galileo, BeiDou und GLONASS) maximiert die Satellitenabdeckung entlang Ihrer Route.
- Mit seiner jüngsten IMU10-Technologie setzt OxTS neue Maßstäbe für das PreisLeistungs-Verhältnis bei inertialen Messungen.
- Die Algorithmen für gx/ix mit enger Kopplung von OxTS verbessern die Resistenz gegen Mehrwegeffekte in Straßenschluchten und beschleunigen die erneute Satellitenakquisition nach kurzen, vollständigen Ausfällen.
- Advanced Vehicle Model-Algorithmen nutzen die Bewegungsprofile von Landfahrzeugen, um fehlerhafte Sensordaten, die zum Beispiel eine Drehung auf einem Punkt suggerieren, herauszufiltern und nur die plausiblen Navigationsergebnisse anzuzeigen.
- Raddrehzahlsensor reduziert Positionsdrift durch die Einspeisung von Geschwindigkeitsdaten in die Navigationsengine in Echtzeit.
- Die Postprocessing-Software LiDAR Inertial Odometry (LIO) von OxTS nutzt LiDAR zur kontinuierlichen Aktualisierung der Geschwindigkeit und Drehrate in der Navigationsengine, um Positionsdrift zu reduzieren.
- Ein integrierter NTRIP-Client und PPP-Unterstützung ermöglichen die flexible Auswahl der besten Quelle von GNSS-Korrekturdaten.
Spezifikationen
| GNSS-Konstellationen | GPS L1/L2C (QZSS); GLONASS L1/L2; BeiDou B1/B22; Galileo E1/E5 |
| Positionsgenauigkeit | 0,01 m RTK; 0,01 m PPP |
| Roll und Pitch | 0.01° |
| Geschwindigkeitsgenauigkeit | 0,025 km/h |
| Heading | 0.04° |
| Schwimmwinkel | 0.05° |
| Position nach 60s GNSS-Ausfall (PP) | 0,21 m |
| Datenausgaberate | 100 Hz; 200/250Hz |
| Betriebstemperaturbereich | -40 °C bis 70 °C |
| Eingangsspannung | 10-48 V |
| Energieverbrauch | 6W |
| Abmessungen | 120 x 120 x 71 mm |
| Gewicht | 690 g |
| Speicherkapazität | 32 GB |
| Schnittstellen | Ethernet, Seriell, Digital |
| Duale Antenne | Ja |
Download
Was spricht für das RT3000 v4?
- Es werden zwei für die Vermessung nutzbare GNSS-Empfänger mit unserer jüngsten IMU10- Technologie kombiniert, um in allen Umgebungen ununterbrochen Positions-, Orientierungs- und Dynamikdaten bereitzustellen.
- Die RT3000 v4 gibt mit einer Frequenz von 100 Hz (optional 250 Hz) Echtzeitdaten über Ethernet, einen seriellen oder den CAN-Bus aus.
- Alle Daten werden im internen Speicher (32 GB) protokolliert.
- Sie können Ihre RT3000 v4 ohne Exportlizenz weltweit einsetzen.
- Die RT3000 v4 nutzt Verbesserungen in der Navigationsengine von OxTS, um die Leistung deutlich zu steigern und dabei nur Komponenten zu verwenden, die uneingeschränkt exportiert werden dürfen.
- Die RT3000 v4 erreicht die angegebene Leistung nach einer dreiminütigen Aufwärmphase mit einfachen Bewegungen. Im Gegensatz zu vielen anderen Lösungen sind nicht vor jeder Datenerfassung hochdynamische Manöver erforderlich, die viel Zeit und Bewegungsfreiheit erfordern.
- Laden Sie nur die Funktionen in Ihre RT3000 v4, die Sie benötigen, um Ihr Budget optimal auszunutzen.
- Wenn Ihre Anforderungen sich ändern, können Sie durch RemoteUpgrades weitere Funktionen hinzufügen.
- NAVsuite, die Softwaresuite von OxTS, ist im Leistungsumfang inbegriffen, sodass Sie keine zusätzlichen Softwareabonnements benötigen.
- NAVsuite umfasst alle für die Gerätekonfiguration, das EchtzeitMonitoring, das Postprocessing und die grafische Darstellung der Daten erforderlichen Anwendungen.
- Gemäß ISO 17025 akkreditierte Kalibrierung Belegt, dass die IMU in Ihrer RT3000 v4 der Spezifikation entsprechend funktioniert und die Anforderungen hinsichtlich der Nachvollziehbarkeit erfüllt.
- RT-Range: Berechnet V2V(Vehicle-to-Vehicle)- und V2L(Vehicle-to-Lane)- Messungen in Echtzeit.
- CAN-Einspeisung: Legt CAN-Daten von anderen Geräten (oder dem Fahrzeug) im internen 32-GB-Speicher ab.
- Boresight-Kalibrierung und Georeferenzierung von LiDAR-Daten: Gleicht Daten von der RT3000 v4 mit LiDAR-Daten ab und fasst sie in einer georeferenzierten Punktwolke zusammen.
- Precision Time Protocol (PTP): Synchronisiert alle Geräte in Ihrem System mit demselben Zeitgeber.
- Unterstützung von TerraStar: Ermöglicht den Zugriff auf TerraStar, einen von der Telekommunikationsinfrastruktur unabhängigen GNSS-Korrekturdienst.
- Netzwerk-DGNSS: Unterstützt das Senden und Empfangen von GNSSKorrekturdaten per Ethernet.
- LiDAR Inertial Odometry (LIO): Reduziert die Positionsdrift im Postprocessing durch die Verknüpfung von LiDAR- und OxTS INS-Daten erheblich.
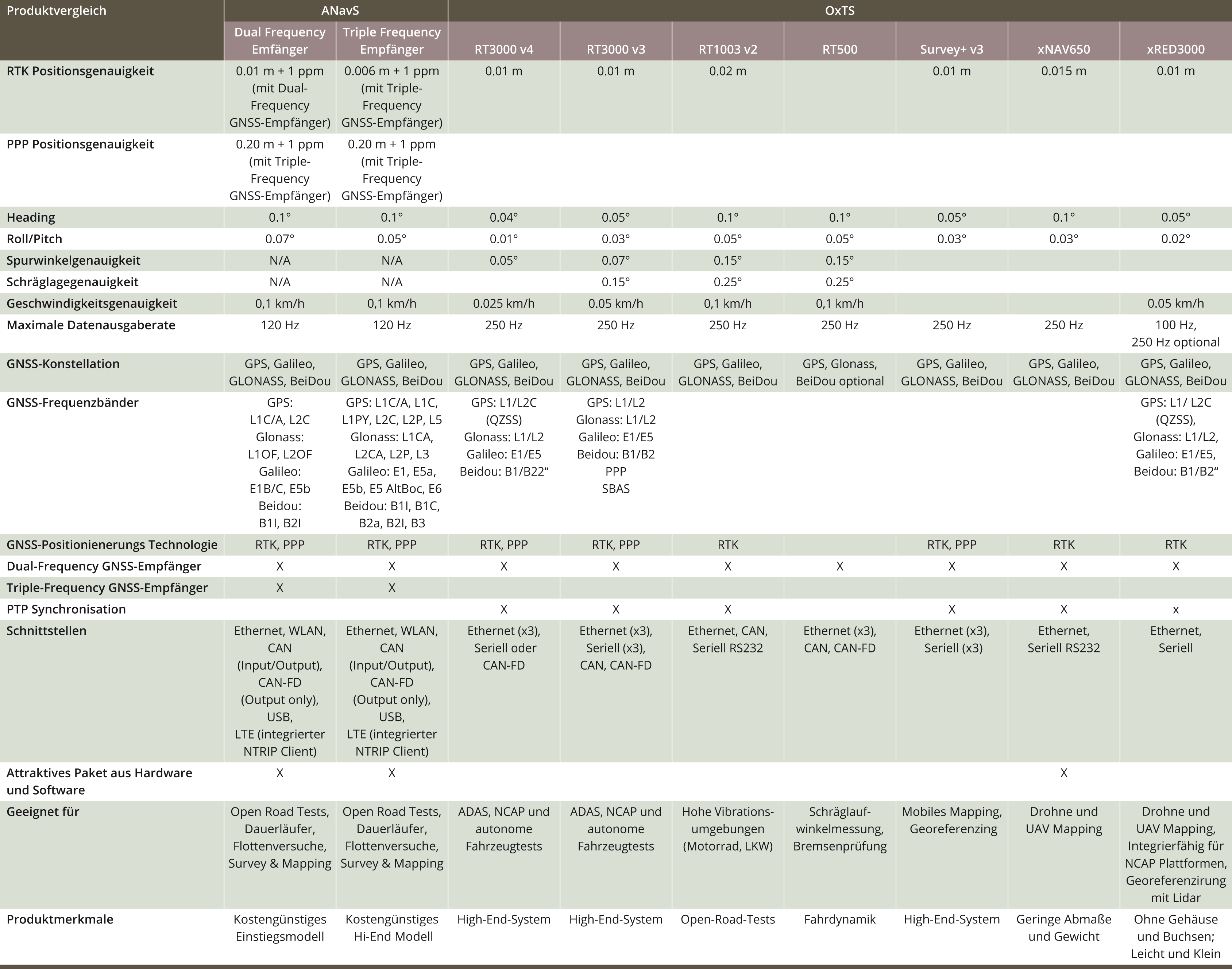
Produktvergleich ANavS - OxTS
Ihr Ansprechpartner
